
Business Challenges






Solution Approach






Business Impact





Technology Stack



Trusted and Proven Engagement Model
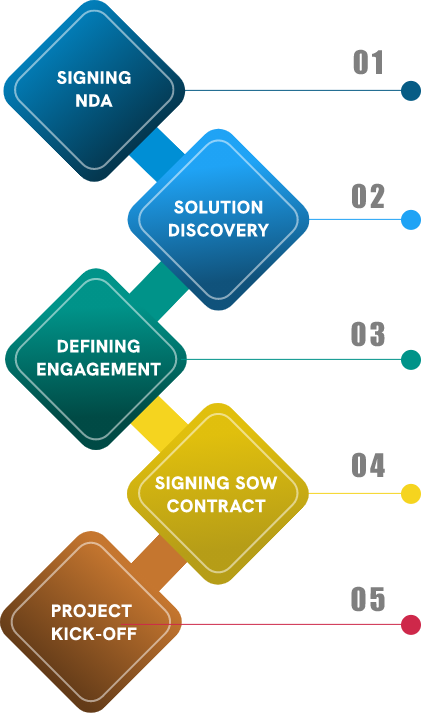
- A nondisclosure agreement (NDA) is signed to not disclose any sensitive information revealed over the course of doing business together.
- Our NDA-driven process is established to keep clients’ data and IP safe and secure.
- The solution discovery phase is all about knowing your target audience, writing down requirements, and creating a full scope for the project.
- This helps clarify the goals, and limitations, and deliver quality products & services.
- Our engagement model defines the project size, project development plan, duration, concept, POC etc.
- Based on these scenarios, clients may agree to a particular engagement model (Fixed Bid, T&M, Dedicated Team).
- The SOW document shall list details on project requirements, project management tools, tech stacks, deliverables, milestones, timelines, team size, hourly/monthly rate cards, billable hours and invoice details.
- On signing the SOW, an official project kick-off meeting shall be initiated.
- Our implementation approach, ecosystem, tools, solutions modelling, sprint plan, etc. shall be discussed during this meeting.
Our Award-Winning Team
A seasoned AI & ML team of young, dynamic and curious minds recognized with global awards for making significant impact on making human lives better

Awarded Bronze Trophy at CII National competition on Digitization, Robotics & Automation (DRA) – Industry 4.0



Awarded as Winner among 1000 contestants at TechSHack Hackathon
Related Success Stories







Related Insights

In the first part of this article, we have discussed about the basics of Image Segmentation, its process…

A safety vest/PPE is an essential supplement for anyone taking part in any industrial activities or a construction site. A Safety Vest is necessary when…